| Version 21 (modified by , 9 years ago) (diff) |
|---|
- ICESHELF
- 6 - Table of Experiments:
- 0 - Publications, reports from the project
- 1 - Objectives
-
2 - Experimental setup:
- 2.1 General description
- 2.2 Topography
- 2.3 Reference axis
- 2.3.2 Reference axis for ice front experiments
- 2.4 References axis along the wall (horizontal and vertical) - Nadine …
- 2.5 Fixed Parameters
- 2.5 Variable Parameters
- 2.6 Additional Parameters
- 2.7 Definition of the relevant non-dimensional numbers (UPDATE WITH …
- 3 - Instrumentation and data acquisition
- 4 - Methods of calibration and data Processing (NADINE)
- 5 - Organization of data files
- 7 - Diary:
ICESHELF
| Infrastructure | CNRS_Coriolis Topographic Barriers and warm Ocean currents controlling Antarctic ice shelf melt |
| Project (long title) | Topographic Barriers and warm Ocean currents controlling Antarctic ice shelf melt |
| Campaign Title (name data folder) | 17ICESHELF |
| Lead Author | Elin Darelius (part I) and Anna Wåhlin (part II) |
| Contributors | Nadine Steiger, Joel Sommeria, Samuel Viboud |
| Date Campaign Start | 04/09/2017 |
| Date Campaign End | 27/10/2017 |
6 - Table of Experiments:
| Exp No. | Name | Date_begin | $H_{total}$ | $T_{rot}$ | $Q$ | $R_{curvature}$ | $\Delta \rho$ | Cameras | Dye | Comments | Notes |
| $(m)$ | $(s)$ | $(L min^{-1})$ | $(m)$ | $(kg m^{-3}$ | names | yes / no | |||||
| 0 | test | 11092017 [hh:mm hh:mm] | 0.60 | 50 | ? | 0.50 | 0 | PC01, PC02 | yes | Elin | |
| 1 | exp01 | ??092017 [hh:mm hh:mm] | 0.60 | 50 | ? | 0.50 | 0 | PC01, PC02 | |||
0 - Publications, reports from the project
1 - Objectives
The warm water threatening to melt the Antarctic ice shelves originates from the deep ocean north of the continental shelf. In order for the warm water to reach the ice shelf cavities it has to pass to topographic barriers: the shelf break and the ice shelf front. In a series of experiments we will explore the role of topography in controlling the onshelf flow of warm water.
2 - Experimental setup:
2.1 General description
The two Barriers - the shelf break and the ice shelf front - will be studied in two separate sets of Experiments.
Part I: Divergent isobaths at the shelf break
An idealized topography representing a widening continental shelf and a trough crosscutting the Continental shelf break is used and the effect of changing 1) water depth 2) radius of curvature and 3) flow speed will be explored. The experiments will be repeated with a) a barotropic and b) a baroclinic current.
Part II: Flow across an ice shelf front
2.2 Topography
2.2.1 Topography for the shelf break experiments (Nadine)

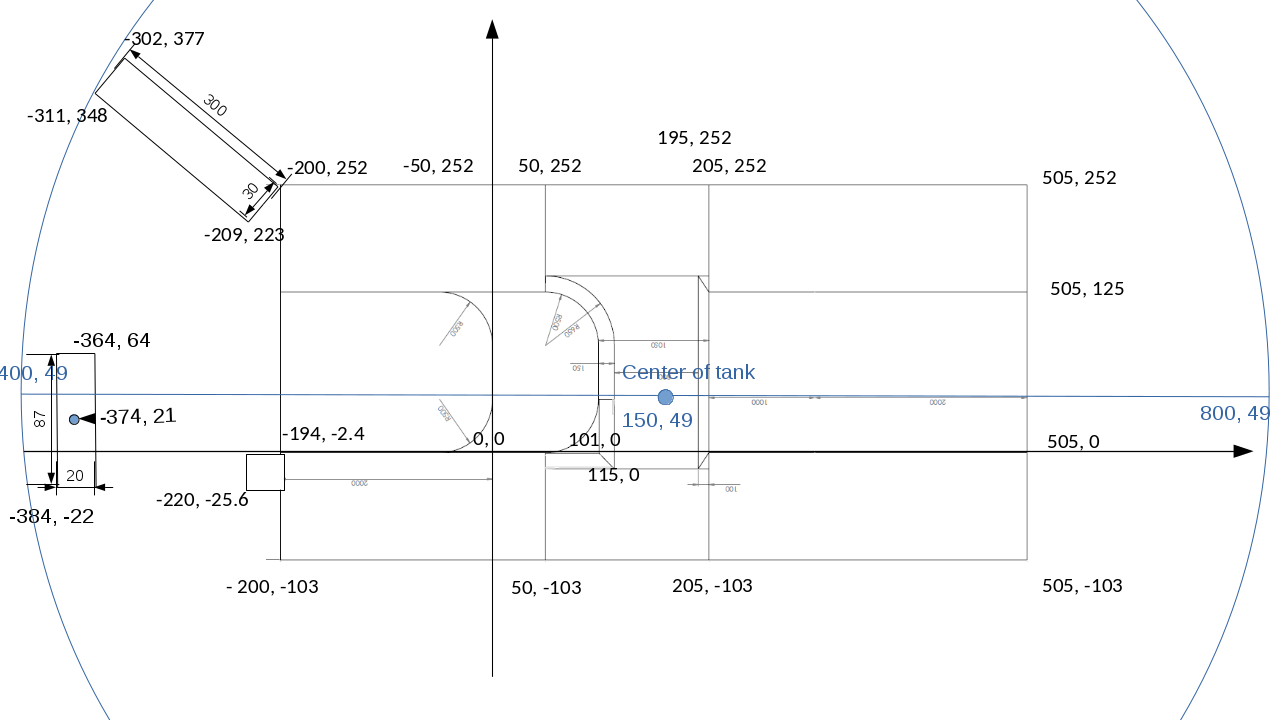
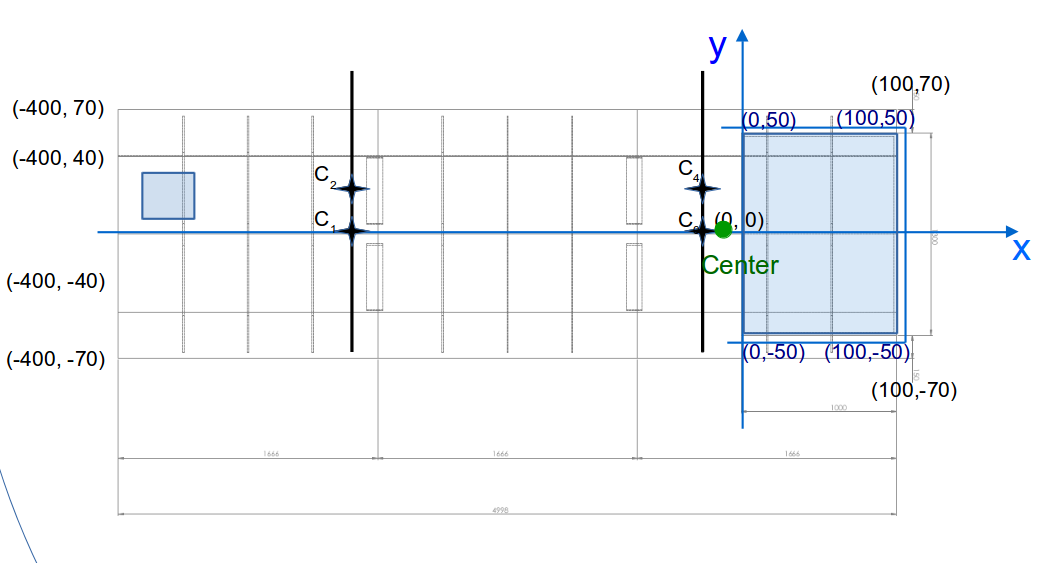
Sketch of the topography seen from above with the distances to the (0, 0) coordinate. The blue circle and the blue line are the tank wall and the centerline, respectively.

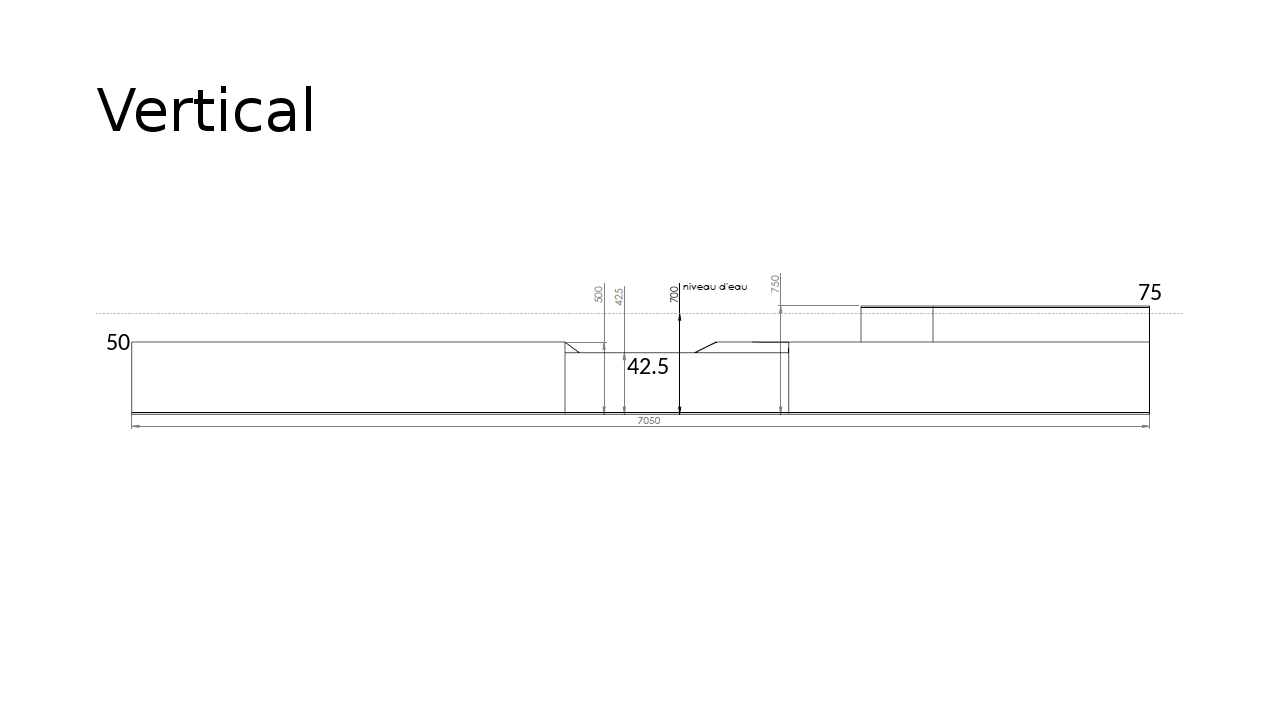
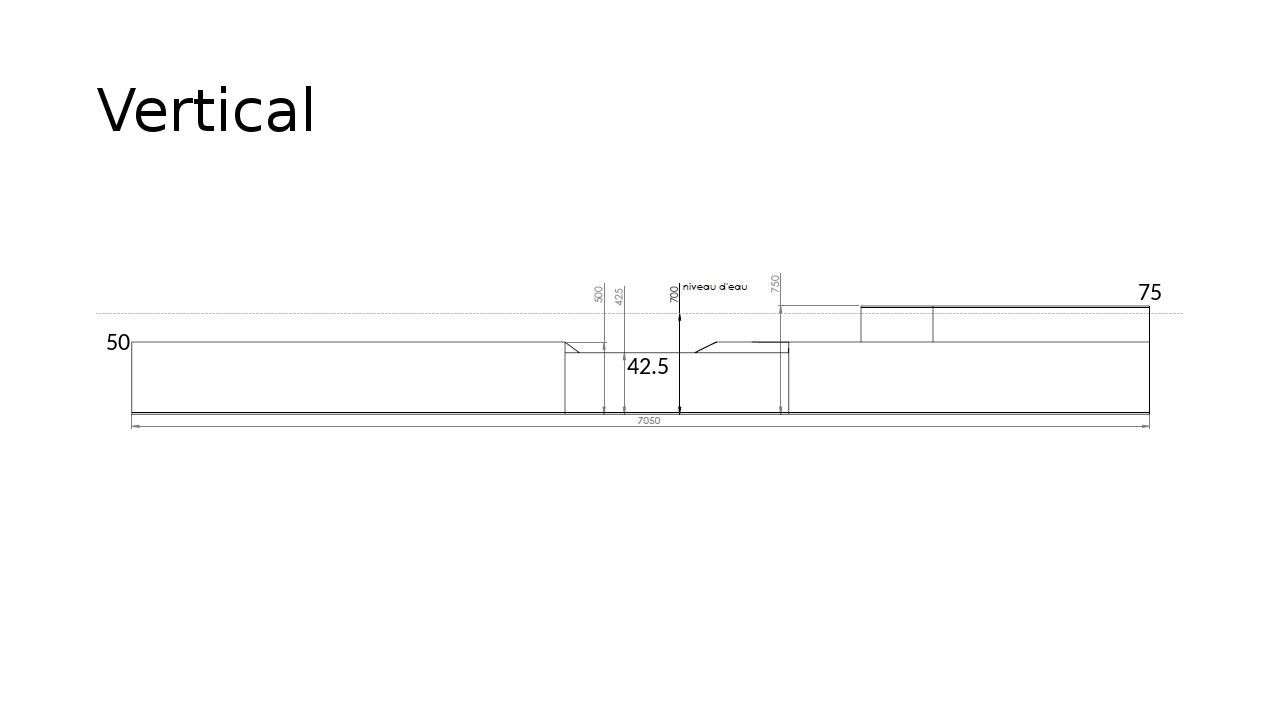
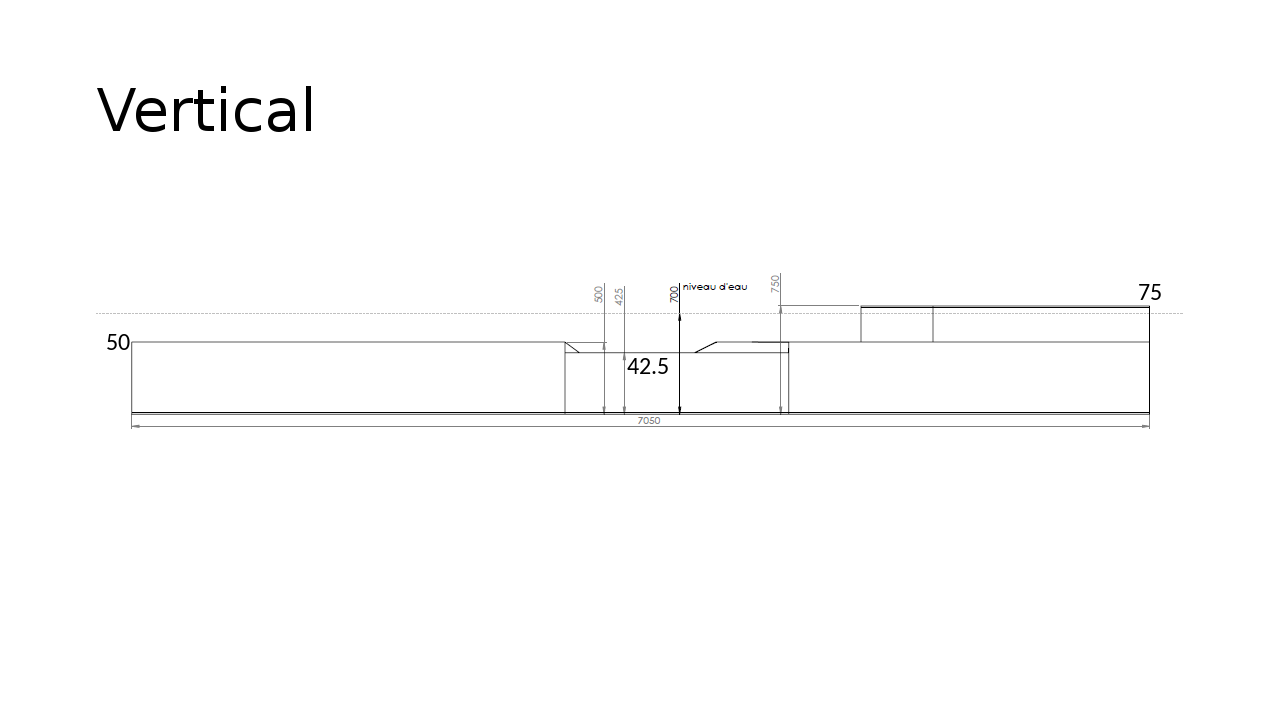
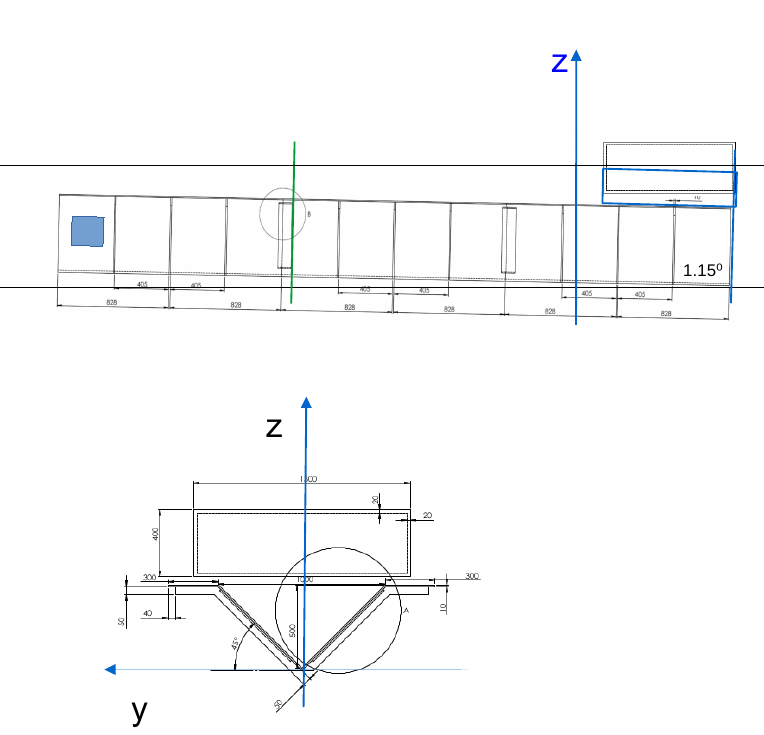
Sketch of the topography seen from the side with the heights of the different areas.
2.2.2 Topography for the ice shelf experiments
2.3 Reference axis
2.3.1 Reference axis for shelf break experiments (Nadine)
By definition we will use Ox and Oy axis to define the along slope and the cross slope axis. The central reference point (0,0) along the slope is chosen to be the first "land" corner downstream of the source. Positive u - direction corresponds to the along slope flow direction, while positive v - direction is directed onshelf.
2.3.2 Reference axis for ice front experiments
2.4 References axis along the wall (horizontal and vertical) - Nadine add image!
By definition we will use Ox and Oy axis to define the along shore and the cross shore axis. The central reference point (0,0) along the wall is chosen to be the closest point to the center of the tank (also labeled M0?). Positive direction corresponds to the mean wave or the mean flow direction.
We use seven references points along the wall to quantify the impact of the free surface deformation and the possible vertical deviation of the laser sheet???

All these points will be measured every day before starting the Experiment??
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | ' | ' | |||
| H_laser_up (cm) | ' | ' | |||
| H_laser_down (cm) | ' | ||||
2.5 Fixed Parameters
| Notation | Definition | Values | Remarks |
| $T_{rotation}$ | Rotation period | $50 \ s-1$ | |
| $H_{shelf}$ | Shelf height | $0.5\ m$ | |
| $H_{through}$ | Trough height | $0.42\ m$ | |
| $W_{trough-slope}$ | Width of slope in trough | m | |
| $s$ | slope | !1:2(Height:Width) | |
| $\nu$ | Viscosity | $10-6m2s-1$ | |
| $L$ | Total length of the wall | $ \ m$ | |
| $W_{Source}$ | Width of source (inner) | $ 23\ cm$ |
2.5 Variable Parameters
| Notation | Definition | Unit | Initial Estimated Values | Remarks |
| $H_{water}$ | Total water depth | $cm$ | 60 - 70 | At the point where waterlevel is not influenced by rotation: r=?? m. |
| $H_{shelf}$ | Depth on shelf | $cm$ | 10 - 20 | estimated where? |
| $R_c$ | Radius of curvature | $m$ | 0 - 0.5 | |
| $Q$ | Flux | $L min{-1}$ | 20 - ??- ?? - 135 | |
| $\Delta \rho$ | Density difference (ambient - inflow) | $kg$ | 0 - 3 - 10 |
2.6 Additional Parameters
| Notation | Definition | Unit | Initial Estimated Values |
| $g'$ | Reduced gravity | $m s{-2}$ | |
| $Rd$ | Baroclinic deformation radius | $cm$ |
2.7 Definition of the relevant non-dimensional numbers (UPDATE WITH OUR NOTATION!!)
Rossby number, $ Ro = U/W/f$.
Relative step size, $H* = \delta H/ (H-\delta H) $. (Cenedese et al, 2005)
Depth of baroclinic current ($H_{BC}=sqrt(2Qf/g')$ (Chapman & Lenz 1994; Sutherland et al, 2009)
Internal rossby radius ($\lambda_i = sqrt (g' H_{BC})/f$.
3 - Instrumentation and data acquisition
3.1 Instruments
Conductivity Sondes (CS)
Particle Imaging Velocimetry (PIV) A Spectra-Physics Millennia ProS 6W YAG continuous laser (532 nm) in conjunction with 2 cameras was used to provide PIV images. The laser light sheet was brought in parallel to the bottom of the tank. The light sheet can then be racked in the vertical through a series of steps through the use of a motorized traverse (tilted at 3.5 degrees to match the slope of the channel) and a mirror set at 45 degrees. The laser has another set of optics to point the light sheet down at the mirror, producing the light sheet. There is a glass window that enables the laser beam to go through the surface of the water tank. A 3D animation of the laser is in the ‘videos’ subfolder of the Photos folder. The laser light sheet positions are then synchronized with the PIV cameras. The field of view extends from close to the upstream end of the first bend, towards the mid-point of the second bend.
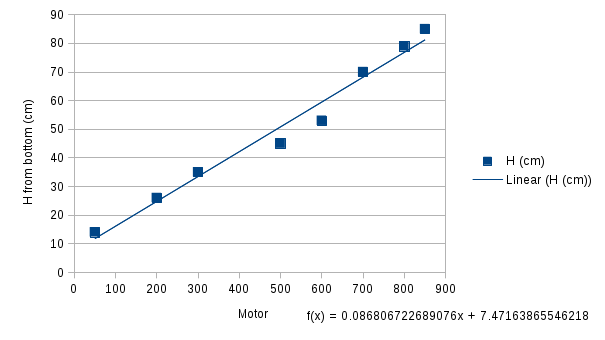
Later experiments used larger seeding particles, 200 micron polystyrene particles for the flow seeding. These work very well for these situations where the measurement area is larger than 2 square metres. The three PIV cameras consist of one Falcon1 camera (Falcon 4M, CMOS 2432*1728 pixels, 10 bits) over the upstream part – with a 35 mm objective lens, PCO2 over the first bend with a 35 mm objective lens, and PCO3 over the most downstream part of the PIV measurement area, which has a 20 mm objective lens. 15 slices in the vertical are taken, each containing 20 images and these are repeated 10 times. Four different times between frames are used, since the velocities were not known a priori and vary as a function of height in the gravity current. So as such, no specific frame rate is used. All this is in the .xml files which can be read by a text editor. The two PCO cameras are PCO.edge5.5 CMOS cameras (2560*2160 pixels). The general approach is to have the lowest slice at approximately 2 cm above the floor, and then there are 2.5 cm heights between each successive level. These varied over time however, so there are a number of slightly different setups – see below. The sequence starts at the highest point, and then steps down through the flow, to the bottom, before switching back to the top again. Heights of laser slices (22/09/16 – 2.5 cm but after that 12/10/2016 and 14/10/2016 and 19/10/2016 all at basal 2 cm).
3.2 Definition of time origin and instrument synchronisation
3.3 Requested final output and statistics
Batch processed camera data in to .png files for those experiments from 18-43 that have PIV data, so that images are in a non-proprietary format. PIV analysis of the flow field through multiple horizontal slices in different Z-positions, for the non-rotating case, and for the rotating cases (experiments 18-43 as above), dependent on the quality of the captured PIV images. Average velocity vectors for the channel slices. Potentially information on vorticity would enable the smaller-scale vortical structures that are obvious in some of the videos, to be identified.
4 - Methods of calibration and data Processing (NADINE)
The PIV data will be processed using the MATLAB tool UVMAT available on http://servforge.legi.grenoble-inp.fr/projects/soft-uvmat.
All images from the experiments will be stored in the directory /fsnet/projects/coriolis/2017/17ICESHELF/DATA under the name for the experiment.
4.1 Calibration for shelf break experiments
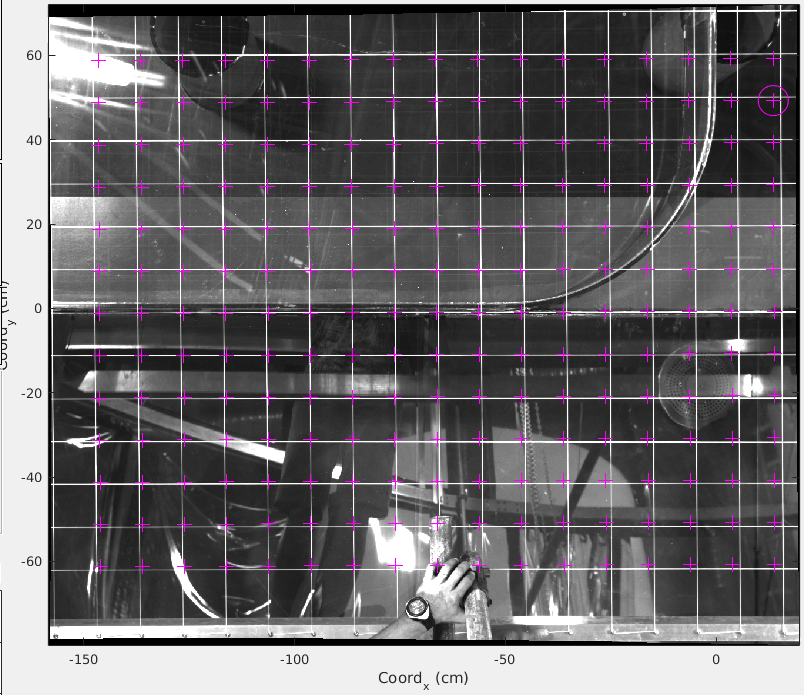
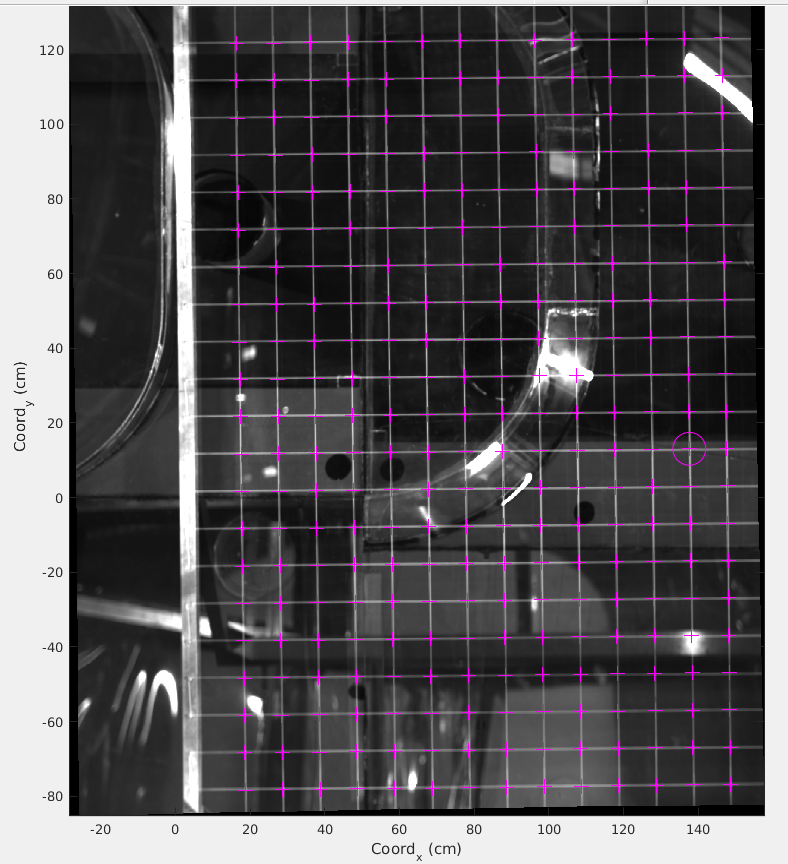
The images for PIV (PC01, PC02) are calibrated from images of a horizontal grid, in 3D with an inclined grid (tilted angles) and in the vertical (NAME OF CAMERA!) for the camera fixed on the tank wall.
The calibrated images with the grids are stored in 0_REF_FILES with the
- 2D calibration in the directory CALIB_07_09
- 3D calibration in the directory CALIB_07_09_3D
- Vertical calibration in the directory CALIB_VERTICAL_08-09
The images are divided into the two different cameras as PCO1/ and PCO2/.

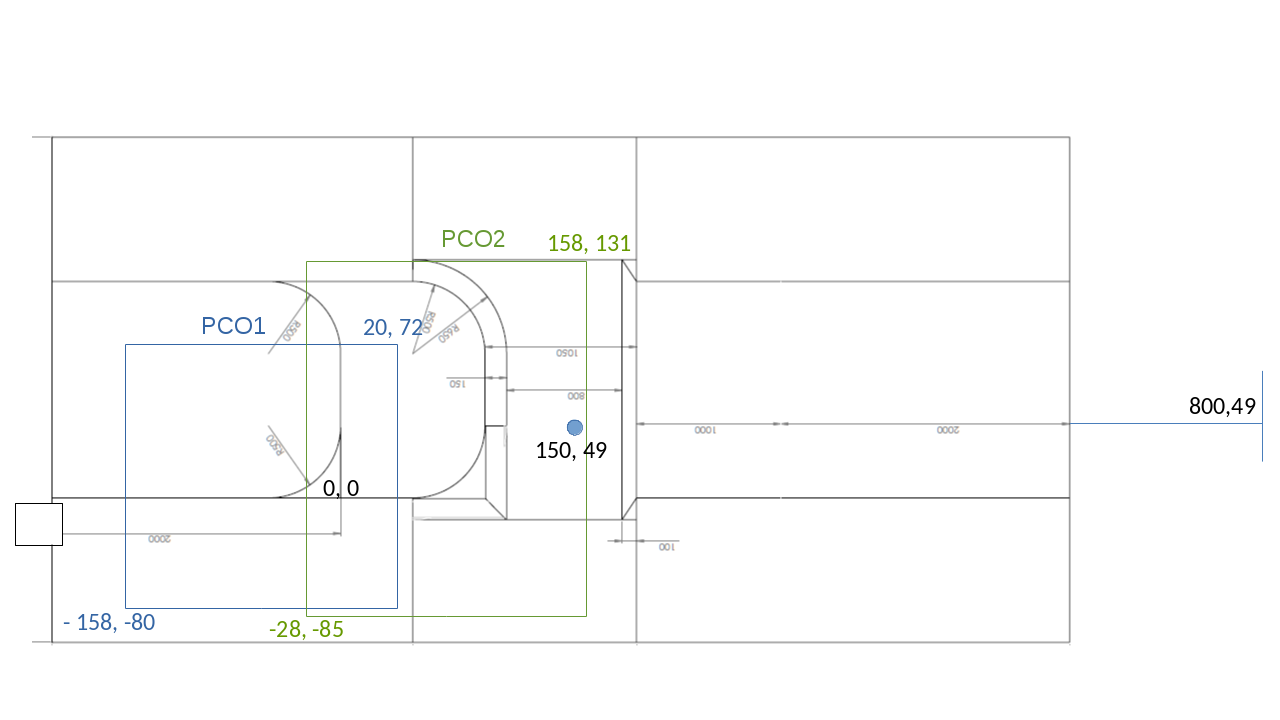
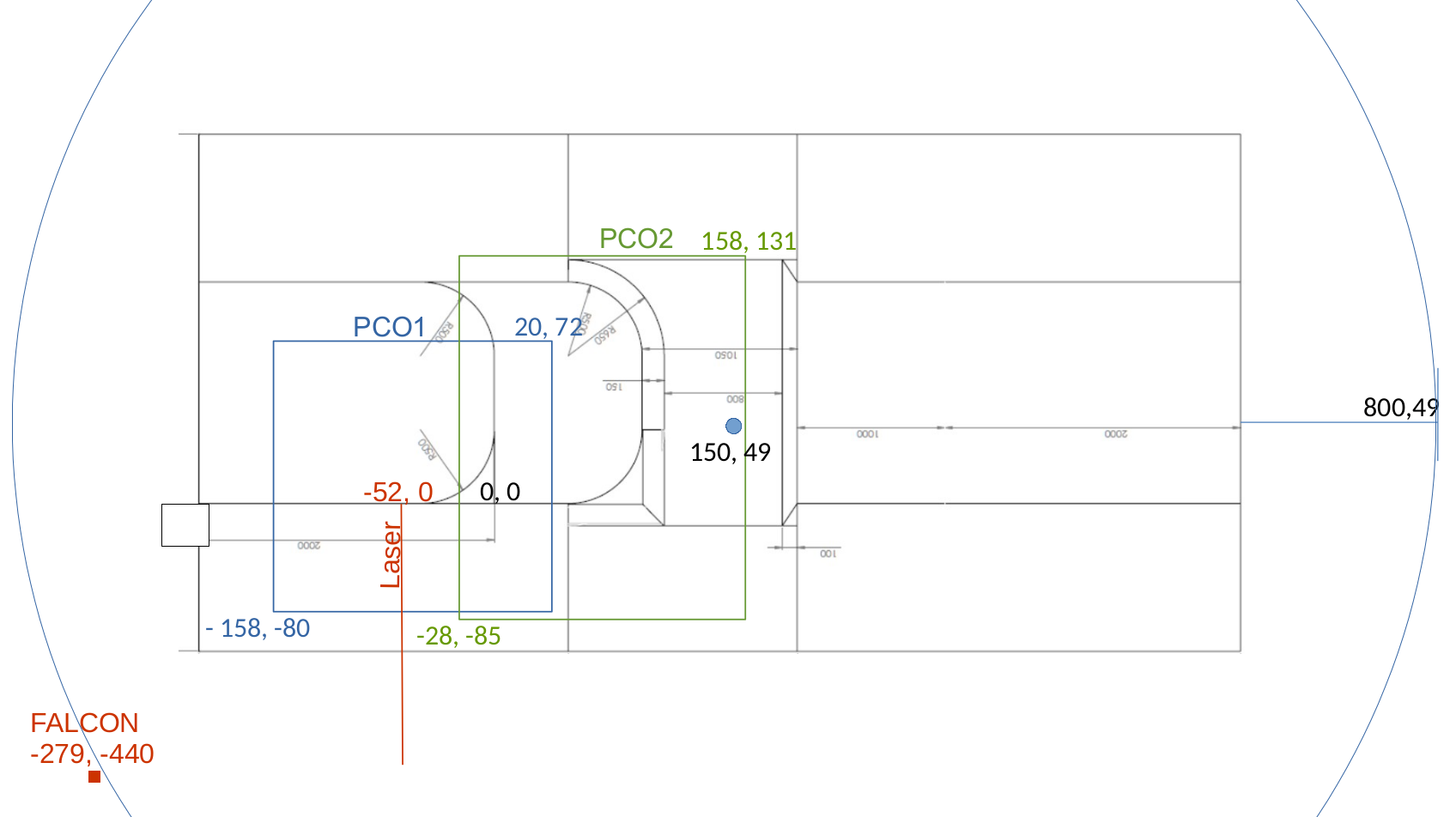
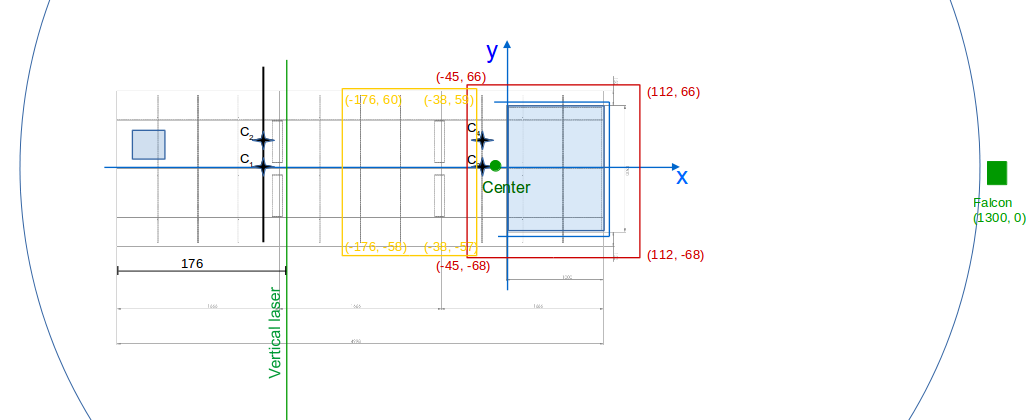
This sketch shows the topography together with the view of the two cameras.
The 3D calibration is done with the geometric calibration function on UVMAT to create 'intrinsic parameters' for each camera that will be used for all images. Calibration points along the inclined grid are marked and translated from image coordinates to physical coordinates defined in section 2.3.1 to later take into account the different height of slices. See http://servforge.legi.grenoble-inp.fr/projects/soft-uvmat/wiki/UvmatHelp#GeometryCalib for details of the method. The calibration parameters are copied in a xml file beside the folders of each camera (for instance PCO2.xml for PCO2/). The xml files also containing all the timing information and have to be copied next to the folders of all images, to use the same intrinsic calibration data for each image taken with the corresponding camera.
The 2D calibration is used as a reference horizontal grid with a grid height of
- z = 80.8 cm for PCO1
- z = 58.2 cm for PCO2


The calibration is checked with a calibration ruler (images saved in CALIB_RULER) to see that the transition between the two cameras is smooth.
For the vertical calibration the images are saved in a different file format with extension '.seq'. The format can be changed in the UVMAT software, but the folder with the vertical images should not be renamed (e.g. '2017-09-08T16.04.32'). To change the image format, choose RUN -> Field Series. Chose the right input file, an select 'extract_rdvision.m', click INPUT and RUN. The image will be saved as a .png file and is ready for use in UVMAT.
4.2 Calibration for ice shelf experiments
5 - Organization of data files
All data related to the project are in:
SERVAUTH4\share\project\coriolis\2016 or
servauth4.legi.grenoble-inp.fr\share\project\coriolis\2016
- 0_DOC: miscellaneous documentation and reports
- 0_MATLAB_FCT: specific matlab functions
- 0_PHOTOS: photos of set-up
- 0_PIV
- Each ‘PIV’ folder contains subfolders for each of the 3 PIV cameras: Dalsa (sometimes Falcon1 – it’s the same thing); PCO2; PCO3 [these are named after the different brands of camera]. Other folders include PCO2.png and PCO3.png which contain processes images of the PCO cameras that are in a non-bespoke format. Other folders that can be within the Camera folder include: Dalsa.sback; Dalsa.sback_1; PCO2.png.civ; PCO2.png.civ_1; PCO2.png.civ_2; PCO2.png.sback: PCO2.png.sback_1; PCO3.png.sback_1. .sback files refer to those files where the background has been subtracted, then civ_1 contains images with the first PIV iteration as processed in UVMAT (Joel’s code) and shows the raw data – with or without the rejected vectors; vectors are shown in four colours, blue = best, green = medium, red = poor, and pink = false. A box can be clicked to hide the false vectors. Civ_2 uses a spline interpretation to interpolate between vectors, so long as they are close enough to the surrounding vectors. Then interpolates all the vectors onto a regular grid. Times for the .png images are in the XML files, or netcdf files.
- 0_Processing: UVP processing scripts in Matlab
- 0_REF_FILES: files of general use (calibration data, grids ...)
- EXP1, EXP2, folder for each experiment with names given in the table below. The names refer to ‘fix’ for non-rotating fixed case, ‘rot’ for rotating case, ‘str1’ for the first straight position (also called position X1), and ‘apex 2’ , for the apex in bend 2 (also referred to as position X4).
- Within each experiments, there is a folder with PIV imagery called ‘Camera’, one for ADV data – ‘ADV’, one for UVP data – ‘UVP’, and one for the data coming directly off of the Coriolis table control system ‘LABVIEW’. Some experiments also contain an ‘Images’ folder or a ‘Gopro folder’ containing Gopro videos.
- Each ‘Camera’ subfolder contains subfolders for each of the 3 PIV cameras: Dalsa (sometimes Falcon1 – it’s the same thing); PCO2; PCO3 [these are named after the different brands of camera]. Other folders include PCO2.png and PCO3.png which contain processes images of the PCO cameras, that are in a non-bespoke format. Other folders that can be within the Camera folder include: Dalsa.sback; Dalsa.sback_1; PCO2.png.civ; PCO2.png.civ_1; PCO2.png.civ_2; PCO2.png.sback: PCO2.png.sback_1; PCO3.png.sback_1
- Each ‘ADV’ subfolder, contains two sub-folders: ‘nkt_files’ containing raw Nortek files, and the ‘mat_files’ are the exported raw data in Matlab format.
- Each ‘UVP’ subfolder contains two folders – one with the experiment name (which is the downstream velocity data) recorded downstream of the velocity inflection downstream of bend apex 2, and one with experiment name ‘_cross’ which contains the cross-stream UVP data recorded at bend apex ‘2. These two folders contain text files for each of the probes. The convention is that Probe 1 is the basal probe, with each subsequent probe being successively higher. There are also .mfprof files which are the raw UVP data in native format. All probes are also integrated into single Matlab files. Lastly, there is a Logfile with the header file for the UVP detailing all of the parameters used in the run.
- Each ‘LABVIEW’ subfolder contains: 1) a .lvm file which is a text file and contains a time-stamp, two voltages for the Conductivity probe on the traverse (C0 – Conductivity, and T0 – temperature [this latter one doesn’t work]), a Trig_cam heading representing the Trigger for the PIV Cameras, Conductivity probe in the input box (C1 and T1), and C2 (this was conductivity for a second probe in the input box which was briefly used before breaking. There is always a record for this but it is just background noise. 2) _position.lvm file which is an XYZ file with a times for the movement of the traverse. 3) Some folders also contain probes.nc files. These are netcdf files and contain the vector data from the processed PIV images.
- Within each experiments, there is a folder with PIV imagery called ‘Camera’, one for ADV data – ‘ADV’, one for UVP data – ‘UVP’, and one for the data coming directly off of the Coriolis table control system ‘LABVIEW’. Some experiments also contain an ‘Images’ folder or a ‘Gopro folder’ containing Gopro videos.
7 - Diary:
Monday 11 September
First day of experiment ! We have many difficulties to get an homogeneous distribution of particles at the level of the laser sheet (located in the dense lower layer). We first spray at the surface the particles (30 microns, 1013 g/l) diluted with quite dense salty water. But after waiting one hour the particles never reach the level of the laser sheet... Hence, in order to be able to visualize something we started to inject directly inside the lower layer with the sprayer. We then succeed to disperse high concentration of particles at the level of the laser sheet.
Three test experiments were performed with the oscillatory flap.
EXP01: Oscillation period 200s, very poor repartition of particles and hard to distinguish the global flow structure.
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 100ms | 0.1 | ? | ? |
Laser parameters
| Laser | Intensity | angle | d-3 | d-2 | d-1 | d0 | d1 | d2 | d3 | |
| $(nm)$ | $(Watt)$ | $(°)$ | $(cm)$ | $(cm)$ | $(cm)$ | $(cm)$ | $(cm)$ | $(cm)$ | $(cm)$ | |
| 532 | 25 | 60 | ' | ' | ' | ' | ' |
EXP02: Oscillation period 100s, we starts to see some oscillation in the flow that propagates along the wall. A large-scale shear flow seems to establish along the shelf.
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.5 | ? | ? |
EXP03: Oscillation period 100s, reduced oscillation amplitude
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.5 | ? | ? |
Thursday, February 16th 2017
The repartition of particles over the tank is better when we arrive in the morning. During all the day, particles are added at the level of the laser beam following the same method than the previous day. The laser angle was changed from 60° to 75 °. Three interdependent parameters of the carrier can be tuned to set the forcing of the oscillating flat: T_flap, A_flap and Vmax_flap. We choose to set Vmax_flap to 3 cm/s to improve the comparison with the MITgcm simulations. Four experiments with different amplitudes and periods were performed to study the sensibility of the formation of topographic wave. In these experiments, we do not stop the record of the camera when we stop the flap to record what happen when the forcing is stopped.
EXP04: Oscillation period 60s
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.1 | ? | ? |
Laser parameters
| Laser | Intensity | angle | d-3 | d-2 | d-1 | d0 | d1 | d2 | d3 | |
| $(nm)$ | $(Watt)$ | $(°)$ | $(cm)$ | $(cm)$ | $(cm)$ | $(cm)$ | $(cm)$ | $(cm)$ | $(cm)$ | |
| 532 | 25 | 75 | ' | ' | ' | ' | ' |
EXP05: Oscillation period 40s
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.5 | ? | ? |
EXP06: Oscillation period 80s
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.5 | ? | ? |
EXP07: Oscillation period 20s
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.5 | ? | ? |
At the end of the day, we want to perform an experiment with the laser in the upper layer but the upper limit of the laser is inside the layer of transition between the upper and lower layer. Consequently, it changes the angle of the laser due to the refraction of the beam into the inhomogeneous layer. This upper limit is fixed by the position of the mirror on which the laser beam is reflected that need to be moved when the tank is empty.
Friday, February 17th 2017
This day is dedicated to the formation of the coastal current in the upper layer.
For the moment, the control of the flow rate is complicated. It can be done by tuning the opening of one valve and estimating the flow rate in the tanks above the platform. It is done by looking at the evolution of the water levels at during 1 minute given by a stopwatch. This is not precise and it takes time to reach the flow rate targeted. We have to build and test some diaphragms to reduce the size of the pipe. Each diagram will be associated with a flow rate which will be constant.
There is no laser in the upper layer. The particles are directly mixed with the water in the tanks above the platform before their injection in the surface layer. These particles are lighted by the diffusion of the laser from below. Consequently, it is possible to see the water added by the injectors into the upper layer but all the other part of this layer are not visible. Indeed, the signal of the particle at the depth of the laser beam (i.e. in the lower layer) is too strong. This is a main problem that has to be changed by moving up the mirror which reflect the laser.
The stratification is not very good when filling from the bottom of the tank. The process will consequently be changed. The tank will firstly be filled with the salty water. The upper layer will be added directly into the surface layer using diffusers.
The laser stopped by itself during the experiment 8. This happened also shortly after the beginning of an experiment we did not save as no water injected had not enough time to reach the camera field-of-view. The problem comes from the tarpaulin of the platform which is close to the fan of the laser cooler. This blocks the evacuation of the air and increase the temperature inside the laser device. To prevent any damage, the laser is automatically shut down when a maximum temperature is reached. Now, the tarpaulin is open behind the cooler but it results in a hole letting the air to enter inside the platform. Moreover, the fan of the cooler might warm the water surface locally which can perturb the upper surface. Consequently, the cooler has to be put outside the tarpaulin to prevent all these effects.
The exit of the injector is not along the wall as it exists a gap of 20.5 cm. A large amount of the water injected turn to the right when it is injected and do not flow along the wall. This effect reduces when the flow rate is increased. It needs a flow rate by far superior (30 l/min) than what it was planned (7 l/min). Moreover, the separation of the flow due to the geometry adds a lot of perturbation that lead to the creation of large eddies. For example, a large cyclonic eddy stays close to the exit of the injector for a flow rate of 7l/min. We need to prevent this effect adding a wall between the onshore part of the injector and the wall. This solution was tested with a wooden sheet hold by hand which seems to drastically reduce this effect. A fixed one will be added when the platform will be empty on Monday.
All the different problems mentioned before will be solved when the platform will be empty on Monday. Three experiments were performed but, as the flow is perturbed in many ways, we do not think that it will be representative of the flow when the different problems will be solved.
EXP08: Injection flow rate 7.2 l/min
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.5 | ? | ? |
EXP09: Injection flow rate 7.4 l/min
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.5 | ? | ? |
EXP10: Injection flow rate 35.3 l/min to 60 l/min. We increased the flow rate from 35.3 l/min to 60 l/min after XXXX minutes of recording the see its impact on the formation of the coastal current.
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO | after carriage | 50ms | 0.5 | ? | ? |
Monday, February 20th 2017
The platform is empty in the morning.
The day begins by the calibration of the two CTD sensors using 7 samples which span from 998.6 to 1025.1 kg/m3. One 2nd order polynomial regression is applied for each of them to define the relation between the voltage measured and the water density. The profiles obtained are presented in the following figure.

All the distance between each element of the experimental setup and the point of reference along the wall are measured. A schematic of the setup of the first week called smooth shelf configuration is presented in the following figure.

The three downstream plastic sheets were removed to replace them by a triangle which make the transition between the slope and the flat floor. Along the wall, it results in 6.75m of constant shell, 2.74m of transition and 3.27m of flat bottom.
The calibration of two of the three fixed cameras is also done using a target of 2mx2m in the field of view of each of them. Firstly, the target is kept horizontal for the first pictures. Then, it is moved in all directions to have a 3D representation of the target that help to correct the picture. This calibration is not done for the camera recording the flap and the injector as we did not succeed to have a clear picture in the computer.
We saw last week that a lot of turbulence is created at the exit of the injector. A schematic of what was observed is presented in the following figure.

To prevent these perturbations, the shelf is extended and now the exit of the injector is above the shelf to ensure that the water flow directly above it. Secondly, a vertical plastic sheet that link the exit of the injector and the wall is added. We hope that this will prevent the return of the current below the injector and will help the injected water to reach directly the vertical wall.
Tuesday, February 21th 2017
The position of the carrier is changed. The flap is now linked to the downstream edge of the carrier to improve the field of view in the cameras upstream of the transition area.
The laser length is now changed to 90°. The mirror of the laser is also lifted of 8cm to have the laser sheet in the upper homogeneous layer. The laser device is also rotated to have enough light both over the transition area and over the flat bottom.
All the distance between each element of the second experimental are measured. A schematic of the setup of the second week in the canyon configuration is presented in the following figure.

| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | ' | 18 | ' | ||
| H_laser_up (cm) | ' | ' | |||
| H_laser_down (cm) | ' | ' |
Wednesday, February 22th 2017
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | 19.7 | 19 | 18 | 18.5 | 19 |
| H_laser_up (cm) | / | / | / | / | / |
| H_laser_down (cm) | 9.5 | 3.5 | 4 | 7.3 | / |
A CTD profile recorded this morning can be compared to the one recorded at the end of the day yesterday in the following figure : 
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | 19 | 18 | 18.5 | 18 | 18.8 |
| H_laser_up (cm) | / | / | / | / | / |
| H_laser_down (cm) | 6 | 2.5 | 3.5 | 5 | / |
Bottom density => 1009.5 (T 20.9) Surface density => 1002 (T 19.9)
| Lumenera Settings | mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | gain |
| EXP12 | 283 | 1.83 | 4000x1600 | 200 | 2.33 | 39 | 4.43 |
| EXP13 | 283 | 1.83 | 4000x1600 | 200 | 2.33 | 39 | 4.43 |
| EXP14 | 545-560 | 1.83 | 4000x1600 | 200 | 2.33 | 39 | 4.64 |
Thursday, February 23th 2017
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | 19 | 18.7 | 18 | 18 | 18.5 |
| H_laser_up (cm) | / | / | / | / | / |
| H_laser_down (cm) | / | 6.6 | 3.4 | 2.5 | / |
Changeemnt de sonde aprés EXP15, C0 est déplacé et maintenant devient C2. La nouvelle sonde C0 est à la place de l'ancienne C0. Surface nouvelle C0/TO 371 surface libre. C2 est ajoutée aux données lors de l'expérience 17. Le gain de cette dernière est modifié aprés 5min de cette même expérience.
| Lumenera Settings | mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | gain |
| EXP15 | 550-560 | 1.83 | 4000x1600 | 200 | 3.26 | 39 | 4.43 |
| EXP16 | 550-560 | 1.83 | 4000x1600 | 200 | 3.26 | 39 | 7-9 |
| EXP17 | 570 | 1.83 | 4000x1600 | 200 | 3.26 | 39 | 13 |
Friday, February 24th 2017
Position of the flap changed in the morning. A schema of the two positions is given in the following figure.

| Lumenera Settings | mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | gain |
| EXP18 | 576 | 1.83 | 4000x1600 | 220 | 3.26 | 39 | 3.64 |
| EXP19 | 576 | 1.83 | 4000x1600 | 220 | 3.26 | 39 | 3.9 |
| EXP20 | 577 | 1.83 | 4000x1600 | 220 | 3.26 | 39 | 3.9 |
| EXP21 | 599 | 1.83 | 4000x1600 | 220 | 3.26 | 38.6 | 7 |
EXP18: Oscillation
Problem of data recording with the PCO camera during the experiment 18. First 4'35 of the record were not stored due to a lack of disk space.
We stopped the recording before the end of the experiment as the number of particles was not sufficient.
EXP19: Oscillation
EXP21: Oscillation period 80s
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO/FALCON/Lumenera | before carriage | 50ms | 0.3 | ? | ? |
Monday, February 27th 2017
The extraction of the surface layer during the weekend did not succeed. 15 cm of water was extracted but there is still a stratification on the profiles.
The remaining water is mixed by hand and the 15 last centimetres are added using water with the density of the bottom layer. The final density is 1009.1 g/m^3 at 20.2°C. The difference of height with two layers stratification is less than 1 mm.
Checked the horizontal of the laser sheet.Change the flat position to have its reference perpendicular to the wall.
The mixing of the water re-suspend the particles in all the water column. The repartition is now homogeneous but they are in all different layers but not only at the position of the laser sheet. The resulting pictures are less complicated to interpret by eyes because the fronts are less obvious.
EXP22: Oscillation Barotropic period 60s amplitude 16cm
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO/FALCON/Lumenera | before carriage | 50ms | 0.3 | ? | ? |
EXP23: Oscillation Barotropic period 60s amplitude 46cm
| Cameras | location | exposure | dt | size | avg scale | |
| ' | $(ms)$ | $(s)$ | $pix.pix$ | $pix/cm$ | ||
| PCO/FALCON/Lumenera | before carriage | 50ms | 0.3 | ? | ? |
The recycling of the water is started at the end of the day.
Wednesday, March 1st 2017
Injector, reduction of its surface
EXP23: Inejctor diaphragm 19mm "
EXP24: Inejctor diaphragm 15mm "
We test the relation between the flow rate $Q[L/min]$ and the diameter of the diaphragm $D[mm]$. The relation gives the following figure.

| Lumenera Settings | mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | gain |
| EXP24 | 320 | 1.44 | 4000x1800 | 220 | 3.26 | 39 | 3.64 |
| EXP25 | 320 | 1.44 | 4000x1800 | 220 | 3.26 | 39 | 1.8-10 |
'
Thursday, 2 of March 2017
| Lumenera Settings | mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | gain |
| EXP27 | 322 | 1.1 | 4000x1800 | 220 | 3.26 | 39 | 1-8 |
| EXP28 | 322 | 1.1 | 4000x1800 | 220 | 3.26 | 39 | 1-8 |
Dist from surface =>1=>Hcoast=18cm Laser_surf=3.4cm; -1=>LAser_surf=3.2cm, 0=>Hcoast=18cm LAser_surf=5.2cm
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | 18?? | 18 | 18 | ||
| H_laser_up (cm) | 14.6 | 12.8 | 14.8 | ' | |
| H_laser_down (cm) | ' | ' |
Samuel starts the day by calibrating ultrasound probes. He also changed on probe (Acq 3. Third from the wall). Values are stored in the file : calib probe 02/03. He different positions are : 0/-0.5/-1/+1/+0.5/0
Profile made this morning is presented in the following figure. 
EXP27=> change of the laser position at 09.39.
Friday, 3 of March 2017
| Lumenera Settings | mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | gain |
| EXP29 | 320 | 1.18 | 4000x1800 | 220 | 3.26 | 39 | 1-8 |
| EXP30 | 320 | 1.18 | 4000x1800 | 220 | 3.26 | 39 | 1-8 |
We lifted the ultrasound sensors of 42mm.
EXP29 =>10h19 13 D (FPS 3)
Mooving of the sensor closer to the wall
EXP30 =>11h46 16 D (FPS 10)
EXP31 =>14h42 19 D (FPS 10)
EXP32 =>16h08 15 D (FPS 10)
Wednesday, 8 of March 2017
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | ' | 19 | 18 | ||
| H_laser_up (cm) | ' | 15 | 14.3 | ||
| H_laser_down (cm) | ' | ' |
EXP33 =>14h55 10.5 D (FPS 3) Problems with the camera PCO at the beginning. We need to compare the date of the first record with the trigger to obtain its time of start (~15h08).
Changement de vanne suite à une fuite.
EXP34 =>16h26 15 D (FPS 3) Problems with the camera FALCON at the beginning. Delay of 201 frames with Dalsa2
EXP35 =>17h56 19 D (FPS 3) Problems with the camera FALCON at the beginning. Several start of the trigger recorded are not representative of the start of the camera.
| Lumenera Settings | mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | gain |
| EXP29 | 320 | 1.18 | 4000x1800 | 220 | 3.26 | 39 | 1-8 |
| EXP30 | 320 | 1.18 | 4000x1800 | 220 | 3.26 | 39 | 1-8 |
Thursday, 9 of March 2017
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | 19.5 | 19.7 | 18.2 | ||
| H_laser_up (cm) | 17 | 16 | 15.5 | ' | |
| H_laser_down (cm) | ' | ' |
Lumenera Settings
| mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | gain | |
| EXP36 | 322 | 1.15 | 4000x1800 | 150 | 3.26 | 39 | 1-8 |
| EXP37 | 310 | 1.2 | 4000x1800 | 200 | 1.7 | 37 | 2-9 |
| EXP38 | 310 | 1.2 | 4000x1800 | 200 | 1.7 | 37 | 10-12 |
EXP36 =>[11h09:The 11h09]:50 The laser sheet before the wall pass through a clean (light) fluid layer without particles. This new option provides a significant increase of the intensity of illuminated particles in the experimental area !! Good option to keep for the next experiments.
Diaphragm 9mm / flow rate 24 lit/min
EXP37 => 14h12:30
Diaphragm 11.5mm / flow rate 33 lit/min (?? strange value according to the previous fit)
The position of lumen era camera was changed for this experiment and new calibration done.
Very nice upstream current with a well defined unstable wavelength on the steep slope.
EXP38 => 15h58
Diaphragm 13mm / flow rate 55 lit/min
Very nice upstream current with a well defined unstable wavelength on the steep slope. We test in the middle of the acquisition the laser sheet in the lower layer (-13cm). It confirms that the velocity in the lower layer is very weak.
Friday, 10 of March 2017
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | 20 | 20 | 19 | ||
| H_laser_up (cm) | 19 | 17 | 16 | ' | |
| H_laser_down (cm) | ' | ' |
Lumenera Settings
| mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | ||
| EXP39 | 310 | 1.2 | 4000x1800 | 200 | 1.7 | 37 | 1-8 |
| EXP40 | 310 | 1.2 | 4000x1800 | 200 | 1.7 | 37 | 17 |
| EXP40 video2 | 311 | 1.2 | 4000x1800 | 100 | 1.7 | 37 | 14 |
| EXP41 | 311 | 1.2 | 4000x1800 | 100 | 1.7 | 37 | 17 |
| EXP42 | 311 | 1.2 | 4000x1800 | 100 | 1.7 | 37 | 17-20 |
| EXP43 | 311 | 1.2 | 4000x1800 | 100 | 1.7 | 37 | 13-16 |
| EXP43_2 | 176 | 1.2 | 4000x1800 | 50 | 2.8 | 46 | 23 |
We start today with a frontal density current (like a buoyant river plume). In other words the injection of fresh water in a deepd fluid layer of uniform density.
EXP39 start injection around =>09h20
Diaphragm 9mm / flow rate 24 lit/min
fps of PCO, DALSA, FALCON stays at 3 images/s
A very thin (small width) current flow along the wall, no apparent signature of instability or any meander formation . But due to the curvature of the laser sheet we didn't see what happens at the same depth everywhere... we are quite deep at the center (M0) of the wall while much closer to the surface at (M1 and M-1).
EXP40 =>10h06
Diaphragm 13mm / flow rate 54 lit/min
Always a stable density front with almost no impact of the bottom shelf bathymetry...
We forget to take a density profile inside the current ! grrr...
EXP41 =>10h!37:55
fps of PCO, DALSA, FALCON was changed to 10 images/s and for all the records below
Diaphragm 15mm / flow rate 75lit/min
Always a stable density front with a slight change on the width of the current from steep to gentle slope, but not sure that it is note due to the curvature of the laser sheet ...
EXP42 =>11h!05:55
Diaphragm 17mm / flow rate 88 lit/min
Always a stable density front with a slight change on the width of the current from steep to gentle slope, but not sure that it is note due to the curvature of the laser sheet ...
Several density profiles were done inside the coastal front.
EXP43 =>14h!32:30
Diaphragm 19mm / flow rate 120 lit/min
A roughly stable front with some few meanders or stretched eddies at the edge of the front.
Wednesday, 15 of March 2017
| Position | M2 | M1 | M0 | M-1 | M-2 |
| H_coast (cm) | 6.6 | 6.9 | 7 | ||
| H_laser_up (cm) | 4.6 | 2.1 | 4 | ' | |
| H_laser_down (cm) | ' | ' |
Lumenera Settings
| mean_dt (ms) | mean_dx (pix/mm) | Area (pix/pix) | exposure (ms) | contrast | brightness | ||
| EXP44 | 1.2 | 4000x1800 | 150 | 2.8 | 46 | 6-10 | |
| EXP45 | 1.2 | 4000x1800 | ' | ' | 17 | ||
| EXP46 | 1.2 | 4000x1800 | ' | ' | 14 | ||
| EXP47 | 1.2 | 4000x1800 | 200 | 2.8 | 46 | 14 |
EXP44 =>08h48 fin 9h28
Diaphragm 9mm / flow rate 24 lit/min
A clear stagnation point occurs along the coast where the bathymetric slope changes. The impact of the bottom bathymetry is significantly stronger now.
On the other hand with the 40s period of rotation there is more vibration of the platform which may affect the stability of the recording cameras.
EXP45 =>10h10 fin ?
Diaphragm 13mm / flow rate 48 lit/min
The coastal current (and the eddies) pass over the bathymetric change without any stagnation points
EXP46 => 11h49 end 12h26
Diaphragm 10.5mm / flow rate 34.5 lit/min
Here again a stagnation point appears at the change of the bathymetric slope and the coastal flow is strongly reduced along the wall on the gentles slope area.
EXP47 =>14h11 end 15h00
Diaphragm 7.5mm / flow
Attachments (18)
- DSC_0811_00001.jpg (59.5 KB) - added by 9 years ago.
- PCO1_Calibration2.png (437.0 KB) - added by 9 years ago.
- PCO2_Calibration.png (368.8 KB) - added by 9 years ago.
-
Bathymetry_with_PositionCameras.pdf (47.4 KB) - added by 9 years ago.
Topography with the positions of the cameras
-
Bathymetry_with_Positions.pdf (56.7 KB) - added by 9 years ago.
Topography position relative to the tank walls with source
- Topography_with_PositionCameras.png (57.9 KB) - added by 9 years ago.
- Bathymetry_with_Positions.png (107.4 KB) - added by 9 years ago.
- Bathymetry_Vertical.png (25.3 KB) - added by 9 years ago.
- Bathymetry_Vertical.2.png (25.3 KB) - added by 9 years ago.
- Bathymetry_Vertical.3.png (25.3 KB) - added by 9 years ago.
- Bathymetry_Vertical.4.png (10.0 KB) - added by 9 years ago.
- horizontallaser_switch.jpg (193.0 KB) - added by 9 years ago.
- verticallaser_switch.jpg (96.2 KB) - added by 9 years ago.
- Bathymetry_with_PositionCameras.png (118.9 KB) - added by 9 years ago.
- Conversion_MotorLevel_LaserSheet.png (15.5 KB) - added by 8 years ago.
- Channel_Sideview_with_Coordinates.png (57.7 KB) - added by 8 years ago.
- Channel_with_Coordinates.png (60.8 KB) - added by 8 years ago.
- Channel_with_CameraPositions.png (42.7 KB) - added by 8 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip